Arduino板是进入程序员的硬件黑客体系的最简单方法之一。那里有大量的初学者项目,几乎适合具有编程背景的任何人。即便如此,对于那些时间较短的人来说,开始使用它似乎也很艰巨。如果您想以您已经熟悉的程序语言开始尝试自制的电子产品怎么办?好消息:您可以!
我们已经向您展示了如何使用Python控制Arduino板。
硬件列表
对于此项目,您将需要:

今天的教程将使用Arduino Uno板。我们稍后将在该项目中使用的Johnny-Five框架支持大多数Arduino兼容微控制器,尽管您的板将需要具有PWM功能以使伺服器保持满意。
电路设置< /
像这样将伺服器连接到Arduino:

简而言之,VCC线( RED )连接到Arduino的5v引脚GND线(黑色或 BRO WN )连接到Arduino的GND引脚,而Pulse线(黄色或橙色)连接到Arduino的引脚10。请注意,虽然您不必将其专门连接到引脚10,但必须将其连接到PWM引脚,通常用〜表示。
仔细检查您没有混用上所有电线,然后将Arduino连接到您的计算机。我们将为此项目使用Windows 10。该项目的所有元素也都适用于Mac和Linux,尽管某些安装说明可能略有不同。
如果尚未安装,请下载Arduino IDE并选择您的 Board 和端口从工具菜单中。如果这是您第一次这样做,那么这一切都是一个谜,我们的Arduino入门指南可以帮助您完成这些步骤。

连接好后,上传 StandardFirmataPlus 示例草图。您可以在示例>固件> StandardFirmataPlus 下的文件菜单中找到此草图。您根本不需要修改草图,它实际上只是将Arduino设置为等待外部指令,稍后我们将为您提供这些指令。
Johnny-Five的JavaScript机器人技术
我们将使用Javascript控制Arduino的框架称为Johnny-Five。毫不奇怪,考虑到电影的名字,该项目适合与机器人技术合作。

要安装Johnny-Five,我们必须首先安装Node.js。您可以从Node.js网站下载其最新版本。我们使用的是推荐的发行版,在撰写本文时为 8.9.4 LTS 。
打开 .msi 文件并按照安装说明进行操作,确保将其添加到您的 PATH 中。当前的Node.js安装程序将PATH作为标准添加,尽管值得在安装过程中进行检查,因为这是下一步所需的操作。

安装完成后,我们将可以访问节点包管理器(NPM)包管理器。点击开始,然后输入CMD。在继续之前,我们需要初始化NPM以防止可能的安装错误。不需要任何专业知识,只需键入:
npm init按照屏幕上的提示进行操作。对于今天的项目,您无需进行任何更改,只需按Enter直到返回命令提示符,然后键入:
npm install johnny-five这将安装所有重要的软件包,这些软件包将与我们的Arduino对话。要使该项目正常工作,我们还需要另外一件事,那就是 Keypress 软件包,该软件包将允许我们从键盘上读取击键。
通过输入以下内容进行安装:
npm install keypress一旦安装了所有这些软件包,我们就可以编写代码!
如果在安装过程中遇到任何问题,请尝试在之后再次运行johnny-five install 按键安装。可能只是这里使用的NPM版本的一个古怪之处,但是现在这样做可以避免以后像我一样遇到您遇到的问题。
代码
我们将使用今天约翰尼五公司文档中提供的一部分示例代码,该代码允许使用键盘上的箭头键控制我们的伺服系统。完整的代码可在johnny-five.io上找到,但是我们将在此处详细介绍它,以完全理解它的工作原理。
我们正在为该项目使用Eclipse IDE。
创建一个新文件并将其命名为test.js,并将其保存在以后可以从命令行轻松访问的位置。该脚本首先为所需的库创建变量,并初始化 Keypress 库以侦听传入的数据,然后调用 Board()方法来设置板。
var five = require("johnny-five");var keypress = require("keypress");keypress(process.stdin);var board = new five.Board();请注意,此处的板卡设置是自动的,无需指定端口。如果您有特定的端口设置,或者在自动检测方面没有运气,则可能需要明确指定端口。
下一步,我们要“唤醒"主板并进行设置用于伺服控制。调用 board.on 会一直等到Arduino引脚准备就绪后再继续。约翰尼-五图书馆支持内置的伺服器,我们在引脚10上调用 Servo.Continuous(10)以允许直接控制。
board.on("ready", function() { console.log("Use Up and Down arrows for CW and CCW respectively. Space to stop."); var servo = new five.Servo.Continuous(10); process.stdin.resume(); process.stdin.setEncoding("utf8"); process.stdin.setRawMode(true);进程.stdin 调用可确保我们从键盘接收的所有数据将在下一个代码块中可用。现在,我们要“监听"按键,并使用它们来顺时针(CW),逆时针(CCW)移动伺服器或停止其轨迹。
process.stdin.on("keypress", function(ch, key) { if (!key) { // if no key is pressed, return i.e do nothing. return; } if (key.name === "q") { console.log("Quitting"); process.exit(); } else if (key.name === "up") { console.log("CW"); servo.cw(); } else if (key.name === "down") { console.log("CCW"); servo.ccw(); } else if (key.name === "space") { console.log("Stopping"); servo.stop(); } });});请确保包括所有右括号在底部,如果遇到任何错误,请参考上面链接的整个代码块。保存此脚本,然后打开命令提示符。
挥手!!
现在导航到保存脚本的目录,然后键入以下内容来运行它:
node test.js在向您提供代码中所述的说明之前,程序应立即启动有关主板的信息。尝试按上下箭头键,空格键和 Q 退出。屏幕应该看起来像这样:
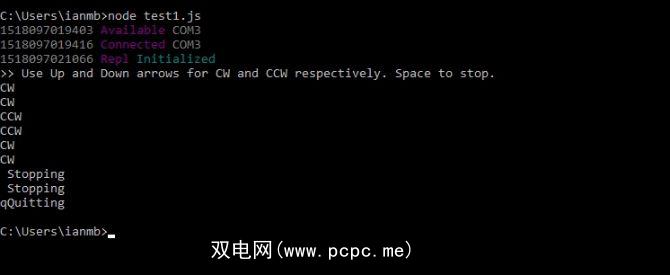
一切都很好,伺服器应该随着您的击键跳动!看看那小小的野兽浪!

谦虚的开始
尽管承担的项目比通常的初学者闪烁的LED教程要大得多,但我们几乎没有涉及到
经验丰富的JavaScript用户应该可以直观地使用Johnny-Five软件包。该库也可以本地安装在Raspberry Pi上,使其成为萌芽的机器人制造商的理想软件包。
该库的优点在于,尽管它是为机器人而设计的,但输入和输出相同数据可用于创建DIY智能家居设置。
标签:







