同时定位和映射(SLAM)可能不是您每天使用的短语。但是,一些最新的炫酷技术奇迹会在其生命周期的毫秒级使用此过程。
什么是SLAM?我们为什么需要它?您所说的这些炫酷技术是什么?
这是一款适合您的快速游戏。其中哪一个不属于自己?
您可能会认为答案很容易成为列表中的最后一项。在某种程度上,你是对的。换句话说,这是一个技巧游戏,因为所有这些项目都相关。

(非常酷)游戏的真正问题是:是什么使所有这些技术可行?答案:同时进行本地化和映射或SLAM!就像酷孩子所说的那样。
一般而言,SLAM算法的目的很容易迭代。机器人将在创建其环境地图的同时使用同步定位和映射来估计其在空间中的位置和方向(或姿势)。这样可以使机器人识别出它的位置以及如何在某个未知空间中移动。
因此,是的,也就是说,所有这些幻想算法所做的就是估计位置。自1990年代第一次海湾战争以来,另一种流行的技术,即全球定位系统(GPS)一直在估算位置。
那么为什么需要新算法呢? GPS有两个固有的问题。首先,虽然GPS相对于全球范围是准确的,但相对于房间,桌子或小十字路口,精度和准确度都会减小比例。 GPS的精确度可低至一米,但是厘米呢?毫米?
第二,GPS在水下无法正常工作。不好,我的意思是一点也不。同样,在厚混凝土墙的建筑物内,性能也不尽人意。或在地下室。你明白了。 GPS是一个基于卫星的系统,受物理限制。
因此,SLAM算法旨在为我们最先进的小工具和机器提供更好的位置感。
这些设备已经具备一连串的传感器和外围设备。 SLAM算法通过使用一些数学和统计信息来利用尽可能多的数据。
需要数学和统计信息来回答一个复杂的难题:位置是用来创建周围环境的地图还是用于计算位置的周围地图?
需要花费实验时间!您被多维扭曲到一个陌生的地方。您要做的第一件事是什么?恐慌?好,冷静一下,喘口气。再举一个。现在,您要做的第二件事是什么?环顾四周,尝试找到熟悉的事物。椅子在您的左边。植物在您的右边。
接下来,一旦瘫痪了对“我到底在哪里?"的恐惧,您便开始行动。等一下,运动如何在这个维度上工作?向前迈出一步。椅子和植物越来越小,桌子越来越大。现在,您可以确认您实际上正在前进。
观察对于提高SLAM估算的准确性至关重要。在下面的视频中,随着机器人从一个标记物移动到另一个标记物,它会建立一个更好的环境地图。
回到另一个维度,您走得越近,您就越会定向。朝各个方向步进可确认此维度上的移动与您的原始维度类似。当您移至右侧时,植物将逐渐变大。有用的是,您会看到其他被您识别为新世界中具有里程碑意义的事物,这些事物可以让您更加自信地漫步。
这实质上是SLAM的过程。
根据估算,该算法使用了几类可分为内部数据或外部数据的数据。对于您的跨维度运输示例(承认这一点,您旅途很愉快),内部度量是步长和方向的大小。
进行的外部度量是图像形式。识别植物,椅子和桌子等地标对眼睛和大脑来说都是一件容易的事。已知最强大的处理器(人脑)能够拍摄这些图像,不仅可以识别物体,而且还可以估计到该物体的距离。
不幸的是(或幸运的是,取决于对SkyNet的恐惧) ,机器人没有人脑作为处理器。机器依靠具有人类书面代码的硅芯片作为大脑。
其他机器进行外部测量。陀螺仪或其他惯性测量单元(IMU)等外围设备在执行此操作时会有所帮助。自动驾驶汽车等机器人也将车轮位置的里程表作为内部测量。
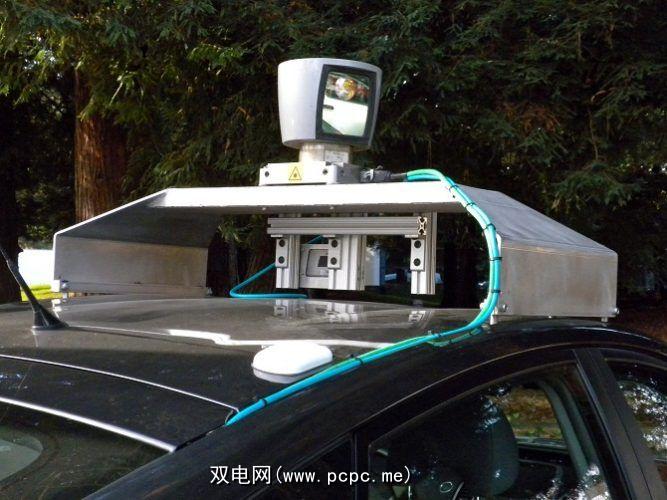
在外部,自动驾驶汽车和其他机器人使用激光雷达。类似于雷达使用无线电波的方式,LIDAR测量反射光脉冲以识别距离。与红外深度传感器类似,所使用的光通常是紫外线或近红外光。
LIDAR每秒发出数万个脉冲,以创建极高清晰度的三维点云图。因此,是的,特斯拉下次在自动驾驶仪上滚动时,它将用激光射击您。很多时候。
此外,SLAM算法使用静态图像和计算机视觉技术作为外部度量。这是用单个摄像机完成的,但使用立体声对可以使精度更高。
内部测量值将更新估计的位置,该位置可用于更新外部地图。外部测量将更新估计的地图,该地图可用于更新位置。您可以将其视为一个推理问题,其思想是找到最佳解决方案。
通常的方法是通过概率。诸如粒子过滤器的近似位置和使用贝叶斯统计推断的技术。
粒子过滤器使用一定数量的通过高斯分布散布的粒子。每个粒子都会“预测"机器人的当前位置。概率分配给每个粒子。所有粒子都以相同的概率开始。
进行相互确认的测量(例如,前进=表格变大)时,位置“正确"的粒子将被逐渐赋予更好的概率。 。距离较远的粒子的概率较低。
机器人可以识别的地标越多越好。地标为算法提供了反馈,并允许进行更精确的计算。
让我们用很酷的技术来分解这一很酷的技术。
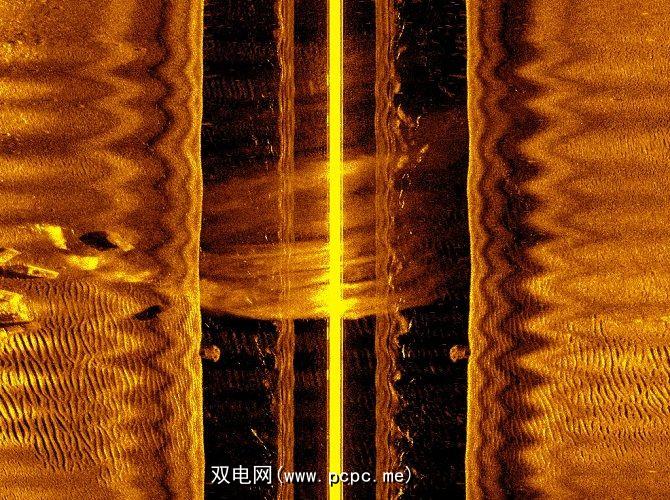
无人潜艇可以使用SLAM技术自主操作。内部IMU在三个方向上提供加速度和运动数据。此外,水下航行器使用面向底部的声纳进行深度估计。侧面扫描声纳创建海底影像,射程可达几百米。
Microsoft和Magic Leap生产了可穿戴眼镜,该眼镜引入了混合现实应用。估计位置并创建地图对于这些可穿戴设备至关重要。这些设备使用地图将虚拟对象放置在真实对象之上,并使它们彼此交互。
由于这些可穿戴设备很小,因此无法使用大型外围设备(如LIDAR或声纳)。取而代之的是,使用较小的红外深度传感器和面向外部的摄像头来绘制环境图。
无人驾驶汽车比可穿戴设备更具优势。具有更大的物理尺寸,汽车可以容纳更大的计算机,并具有更多的外围设备以进行内部和外部测量。从许多方面来说,无人驾驶汽车都代表着技术的未来,无论是软件还是硬件。
SLAM技术正在不断改进
SLAM技术被用于许多不同的领域方法,完善它只是时间问题。每天看到自动驾驶汽车(和其他车辆)后,您就会知道同时进行的本地化和地图制作已可供所有人使用。
自动驾驶技术每天都在进步。想知道更多?查看PCPC.me有关自动驾驶汽车工作原理的详细分类。您可能还对黑客如何瞄准联网汽车感兴趣。
图片来源:chesky_w / Depositphotos